

Factors affecting robot accuracy in robot-vision applications and solutions
The project involves an ABB industrial robot being guided by computer vision to move towards an object. As it reaches the destination, errors in accuracy occur and can greatly deviate the final position from the target. This vision-driven Robotics system is intended for the production and perform task that require high precision. This means that there is always a high standard for accuracy and repeatability. Therefore, it is important to identify and evaluate the affecting elements in order to deliver effective solutions.
The main tasks for this project include:
1. Identifying factors that affect the accuracy of the Robot-Vision system
2. Proposing solutions or methodologies to counteract those identified factors
The objective of this project is to improve the accuracy error of the Robot-Vision system as much as possible on a 2D working surface of 40x40 cm. So far, we have found a total of 6 factors and develop 4 methods to enhance the system's accuracy. With consistency and good communication between the team members, we have effectively mitigated the inaccuracies caused by these factors and enhance the work performance of this system by at least 50% overall..
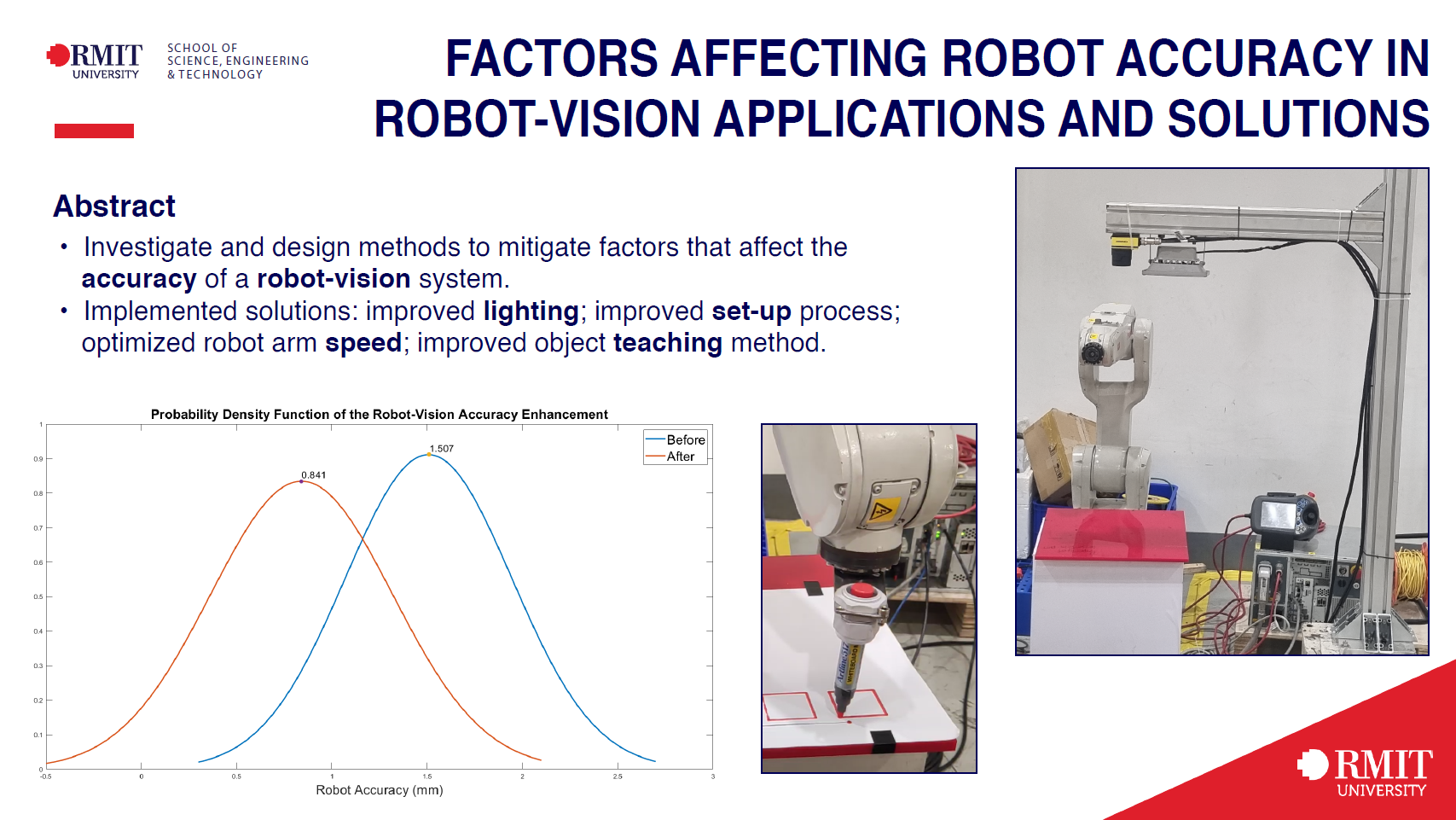
Project Snapshots

