

Easy Jogging Robot with
Lead-through Teaching
Le Thien Lam
Huynh Thien Nguyen
Van Kien Hoang Ai
Jo Jeongik
This project consists of a solution; this solution facilitates the operation and programming of ABB industrial robots. Applying Lead-through technology by using a 3-Dimension mouse for jogging and teaching robot’s paths. We implemented Visual Studio and ABB RAPID RobotStudio programing to process data, configure moving paths, displaying signal status, etc. All for a single purpose is to make easy/eliminate programming completely for the application of ABB industrial robot.
Hardware setup:
Based on the setup diagram in the poster, each major component explanation can be listed below:
The project is divided into two main parts, the hardware system consisting of ABB IRB1520ID robot and the IRC5 robot controller, the host computer and 3DX spacemouse. The hardware flow starting with the host computer collects raw data from the 3DX, these data is transfer via Bluetooth 5.0 connect into host computer’s USB port. In the host computer, a C# program is set up to collect and interpret the data for it to be carried from the computer to the robot controller. The hardware communication between the host computer and IRC5 robot controller is simply with a network RJ45 cable. Between the IRC5 and IRB1520ID are a set of ABB internal connection cables, these cables transfer data from the 3DX that was translated into Robot’s language to control the external axis of the robot. Thus, move the robot.
Software setup:
Based on the poster, our solution’s software setup is demonstrated with the usage of UI and further details with System Workflow:
Following the hardware setup above, data is first collected from the 3DX mouse, this data is then processed by our proprietary ABB User Interface application (C# language). Since ABB IRB robot can only understand RAPID code, therefore data from the mouse is useless at this point. The UI’s Job is to collect, process and interpret the data with some geometry calculations, then send over to ABB robot simulating platform, Robot Studio, via TCP protocol and UDP protocol (TCP is for mouse button teaching and UDP is for streaming robot position from mouse to IRC5).
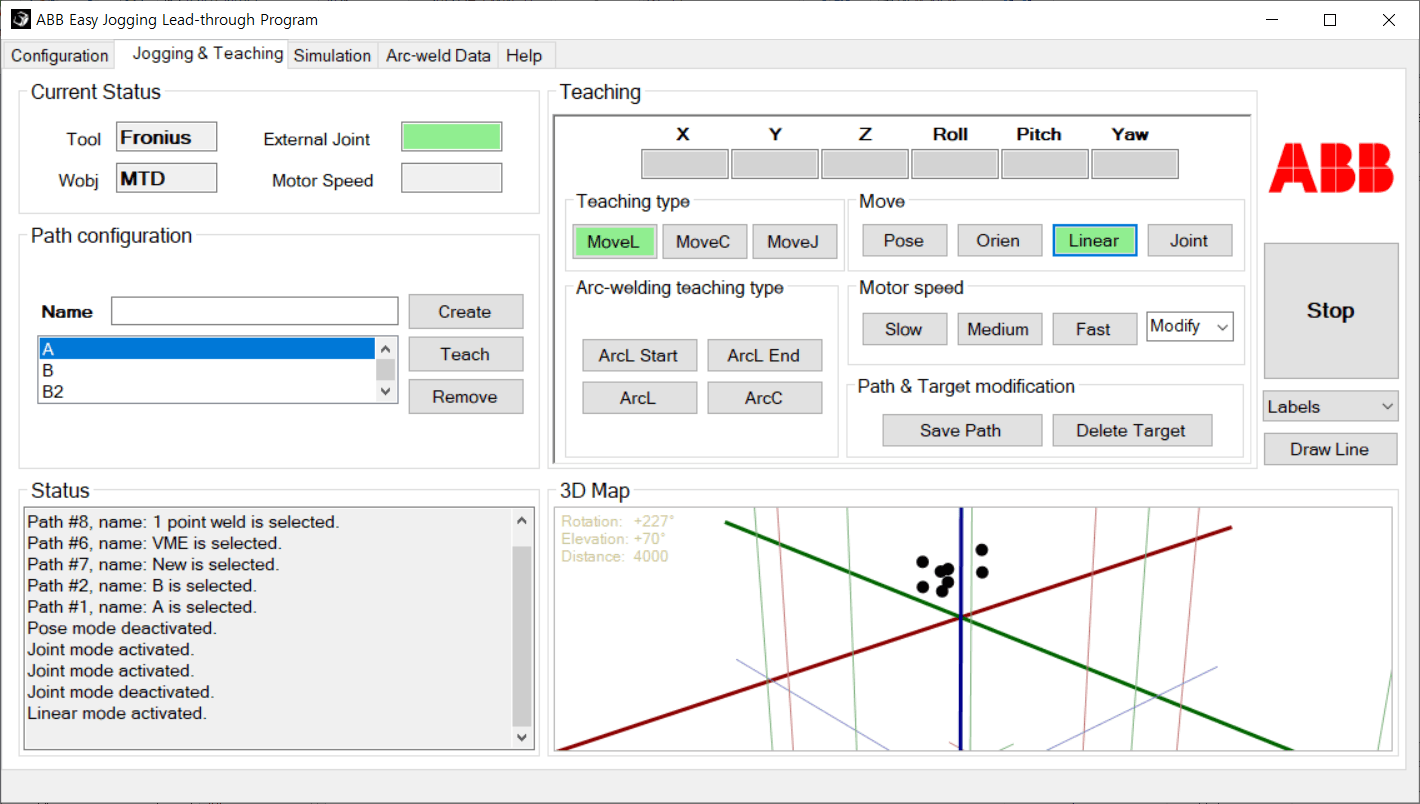
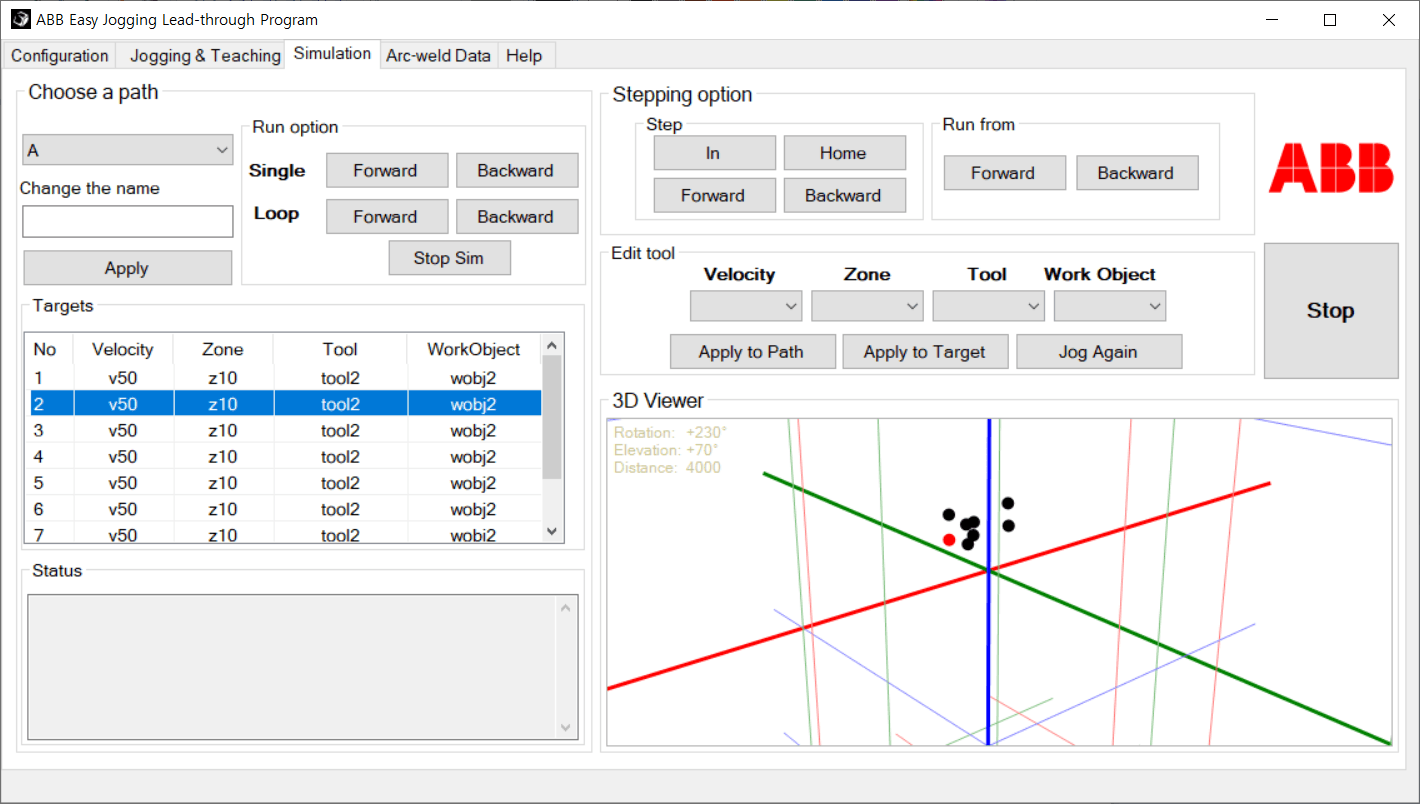
In the UI, there are 3 main tabs: Configuration, Jogging & Teaching and Simulation. The configuration is where we choose the robot controller and set up the network. After connecting, robot is ready for jogging and teaching in Jogging & Teaching tab, after path(s) are created, full custom simulation can be done in the next tab Simulation. The UI allows users to fully connect, control robot movements, and fully custom edit every detail of the jogging and teaching process with a few simple buttons clicks.

Demo Video