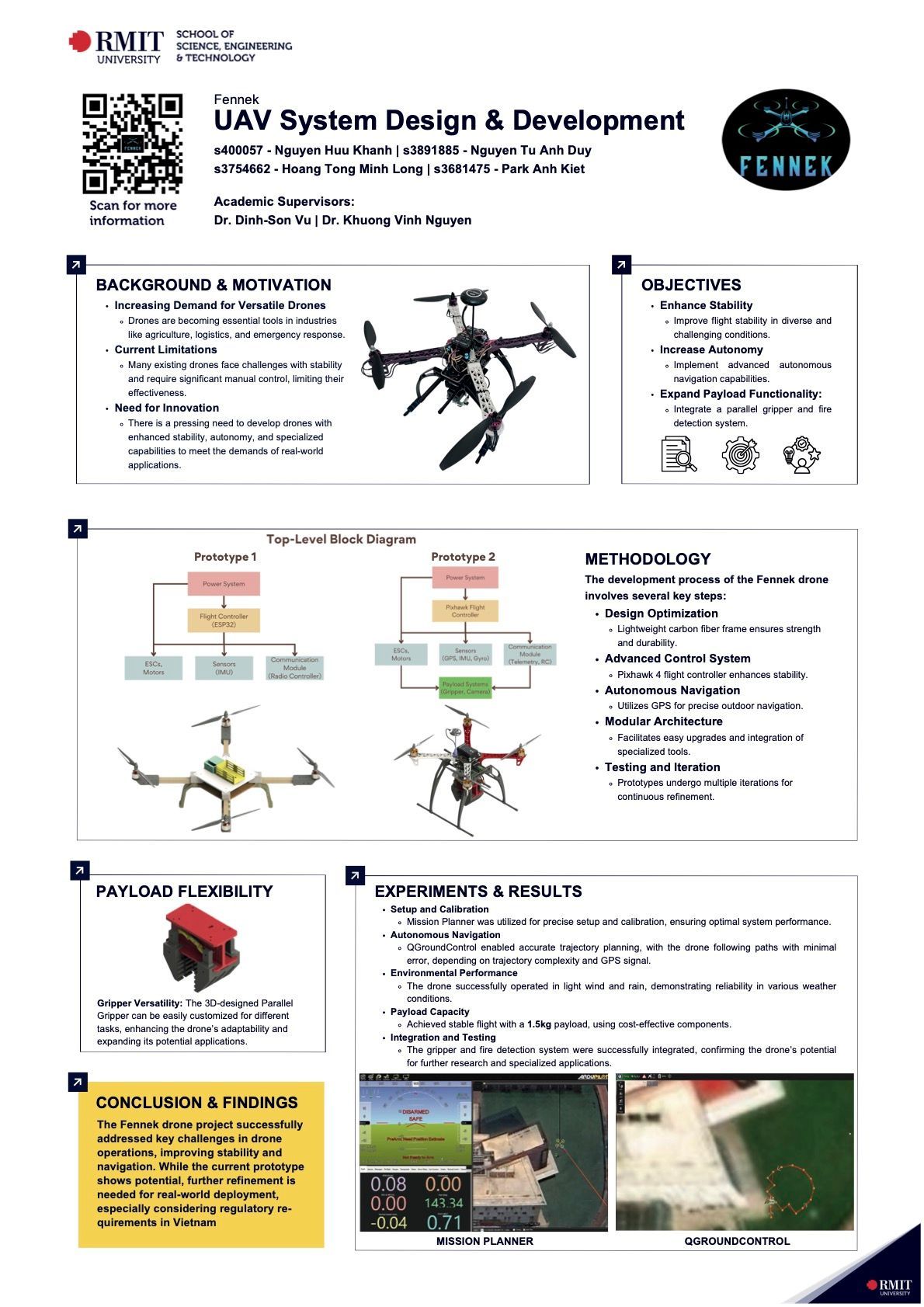
UAV System Design and Development
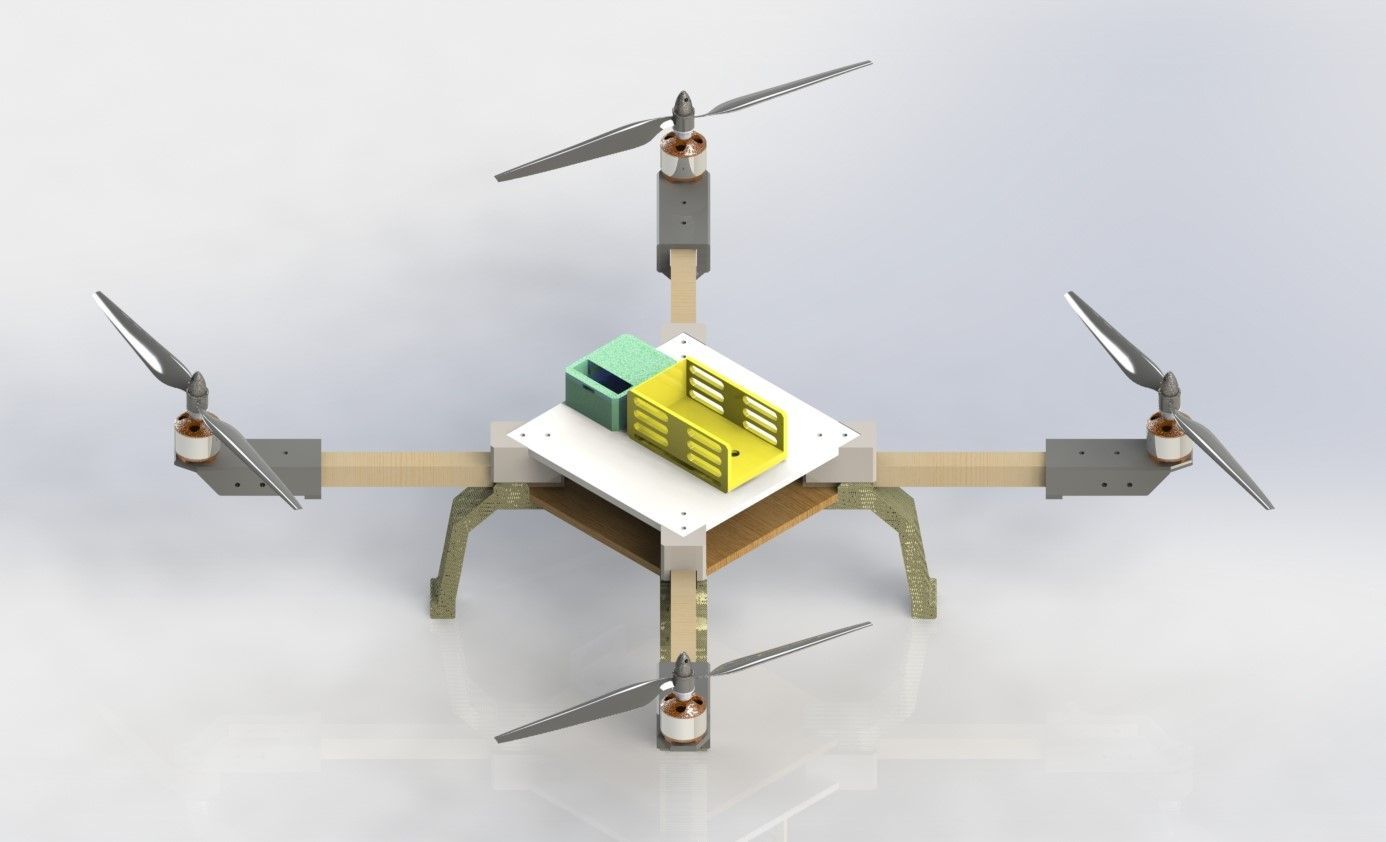
The Fennek drone project focuses on developing a versatile, high-performance drone capable of addressing real-world challenges in industrial and agricultural sectors. Built from scratch, this project involved the creation of two prototypes. The first prototype provided valuable insights into basic flight dynamics but revealed limitations in stability and autonomy. The second prototype incorporated significant improvements, including a lightweight carbon fiber frame, the advanced Pixhawk 4 flight controller, and enhanced sensor integration.
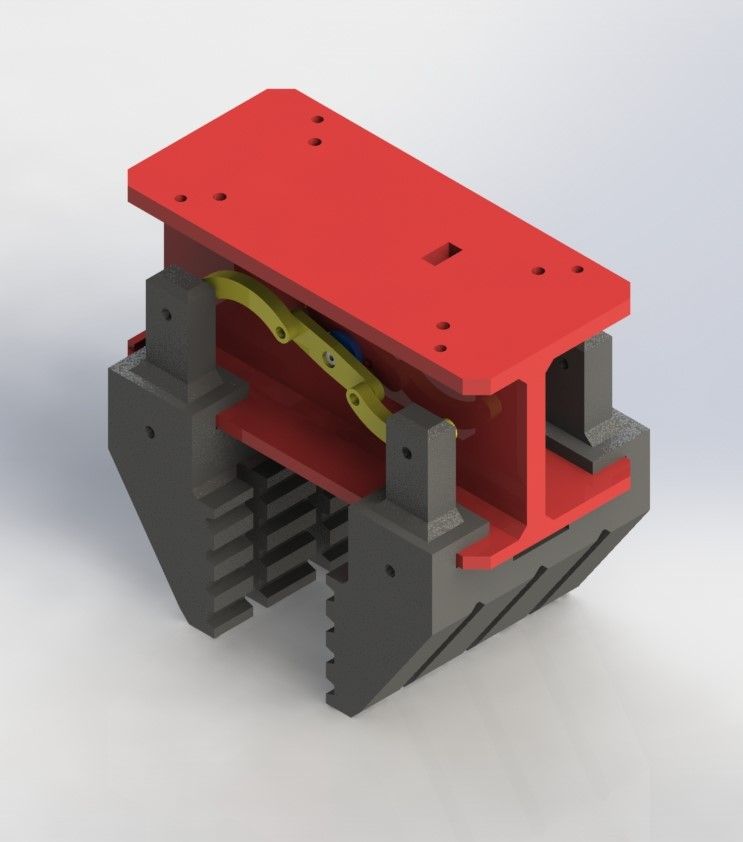
This drone is designed for precise autonomous navigation using GPS, making it reliable in various environmental conditions, including light wind and rain. The addition of a 3D-designed Parallel Gripper mechanism allows for effective payload delivery, while collaboration with the Z-Performance team led to the successful integration of a fire detection system, further expanding its potential applications.
After extensive testing and development, the Fennek drone has proven that it can effectively transport payloads of up to 1.5kg and have a slight deviation in the trajectory following for autonomous navigation. Overall, this project not only demonstrates advances in drone technology but also provides a basis for further study and development of the principles of autonomous systems as well as specific uses of drones.
Project Snapshots