AUTONOMOUS MECANUM-WHEEL ROBOT FOR INTELLIGENT NAVIGATION AND AI TASKS
The goal of the Mek4tronics project is to develop an autonomous mobile robot platform built on ROS2, designed as a versatile tool for education and research in robotics and automation. Unlike task-specific robots, our platform focuses on flexibility, allowing students and researchers to experiment with a wide range of topics, including navigation, localization, mapping, and perception.
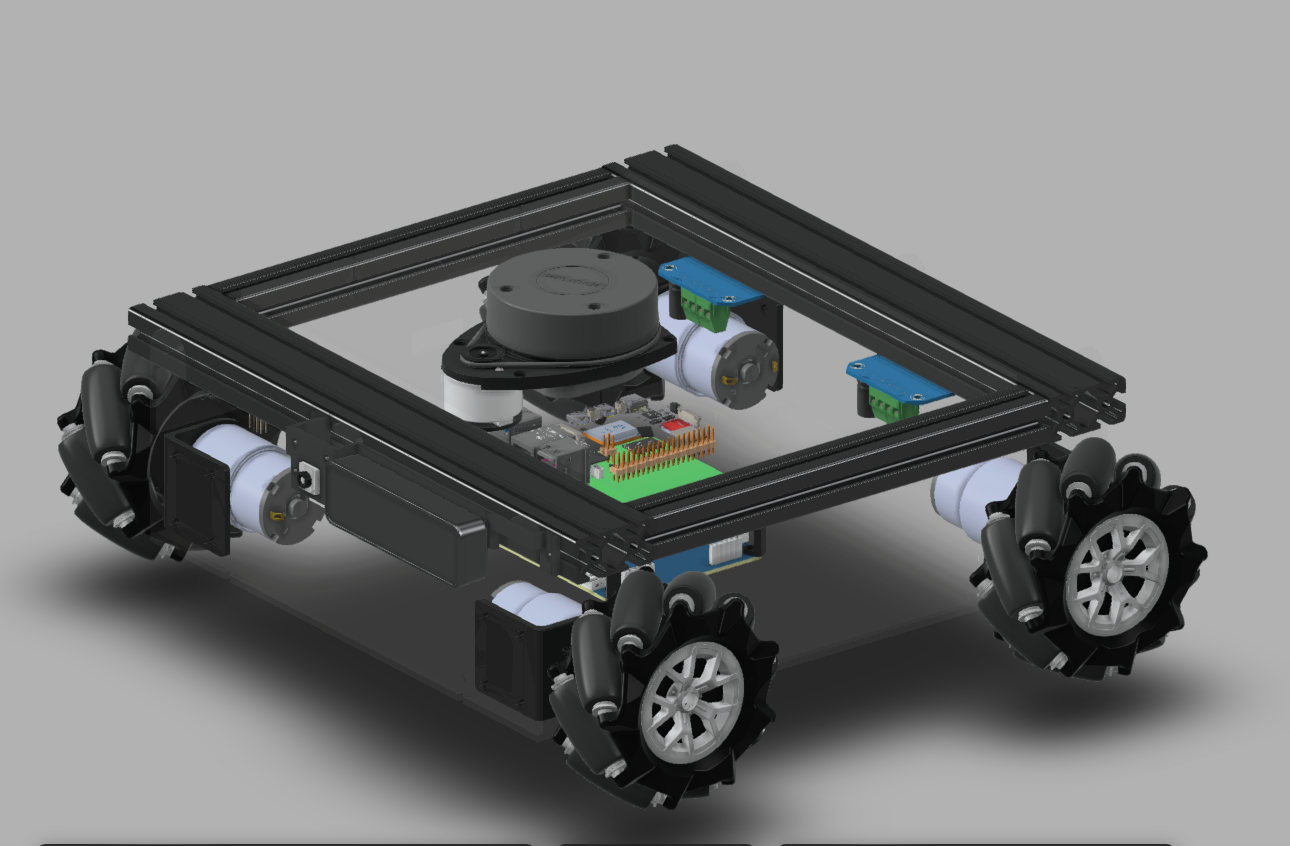
The robot employs mecanum wheels, giving it omnidirectional mobility and making it ideal for testing advanced motion planning algorithms in confined or structured environments. Its control architecture is distributed, with an ESP32 microcontroller handling motor control and a Raspberry Pi 5 executing navigation, image processing, and higher-level decision-making.
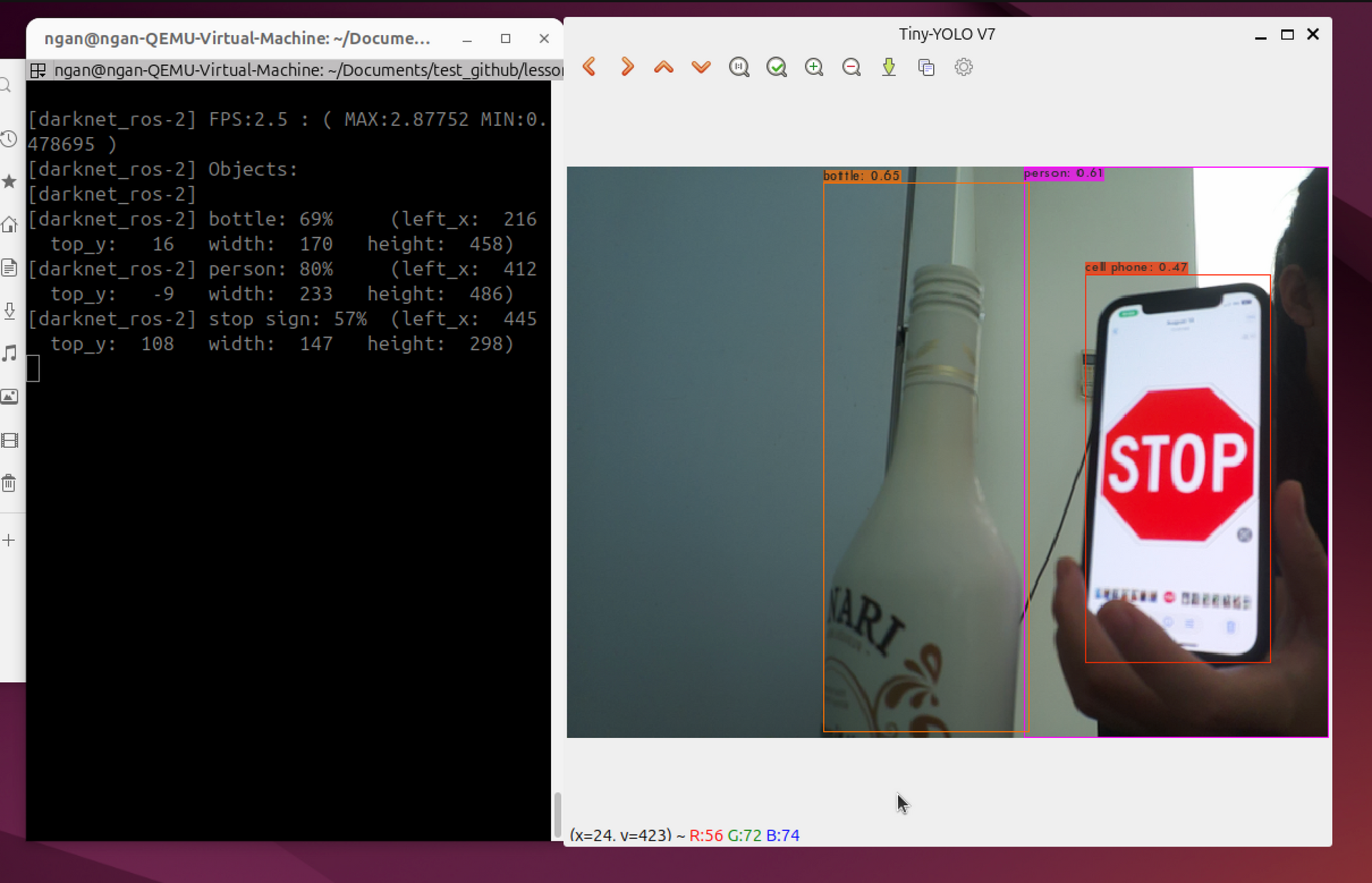
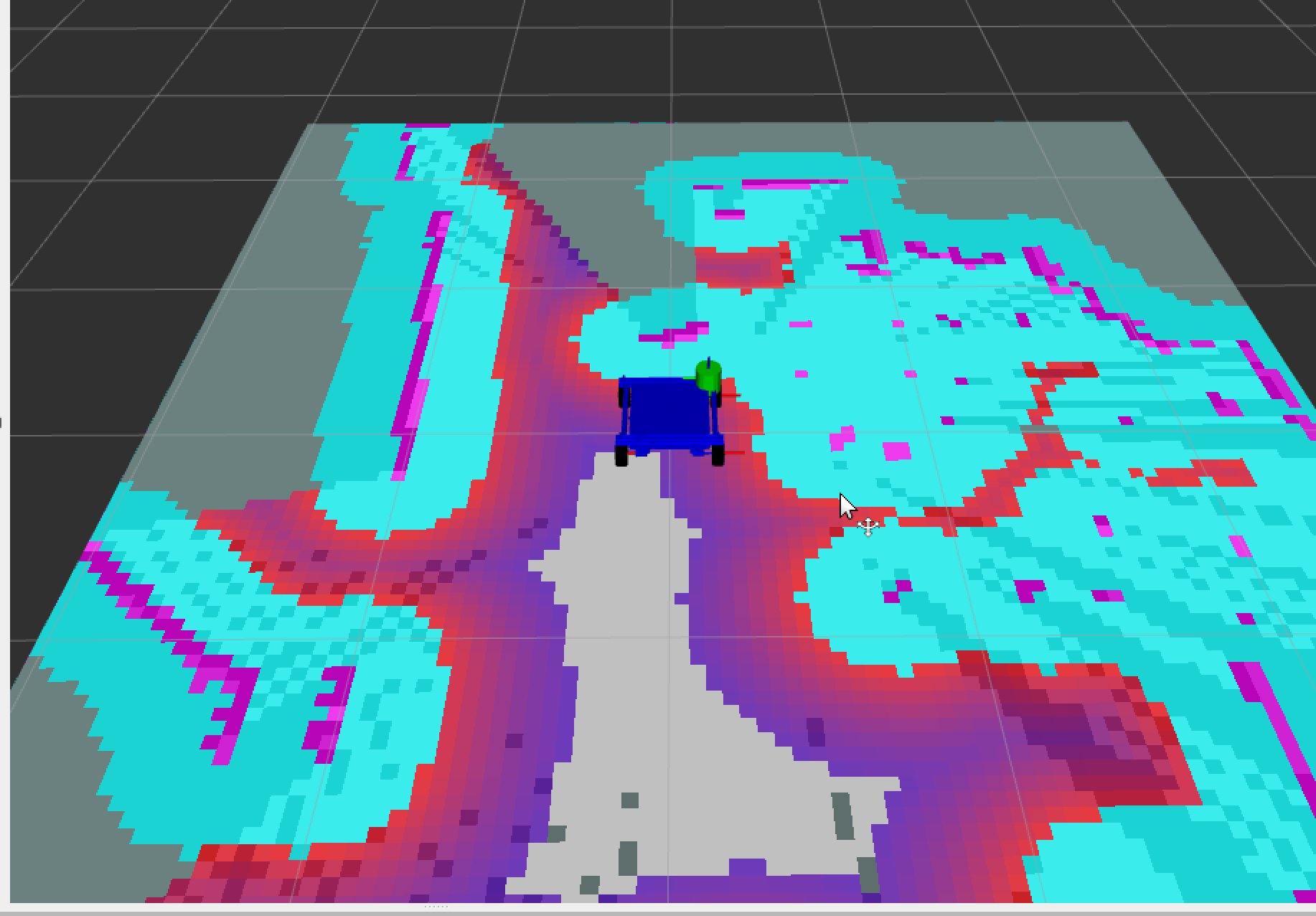
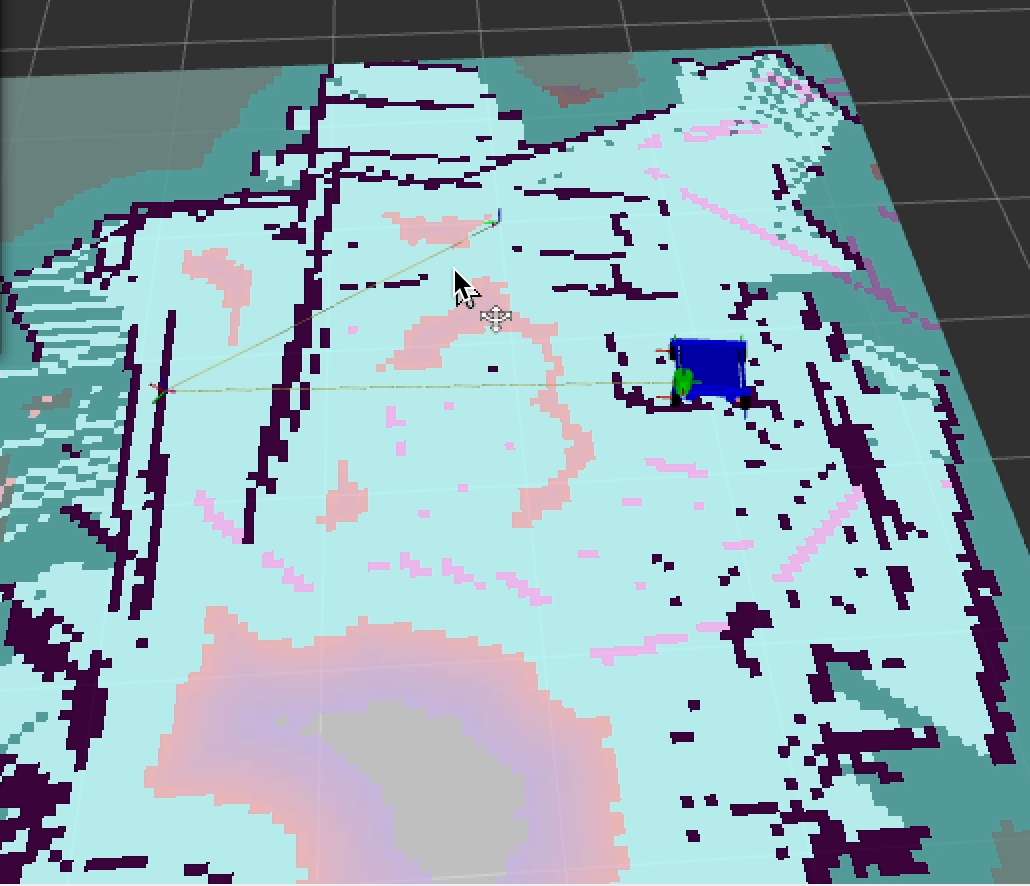
The system integrates 2D LiDAR for mapping and obstacle avoidance, along with an OAK-D-Lite DepthAI camera for depth sensing and computer vision tasks such as object detection, tracking, and localization. With these capabilities, the platform supports both autonomous exploration and perception-based interaction with its environment.
Ultimately, this project aims to provide a modular, extensible, and open platform that can serve as a foundation for research experiments, student projects, and the development of intelligent autonomous systems.
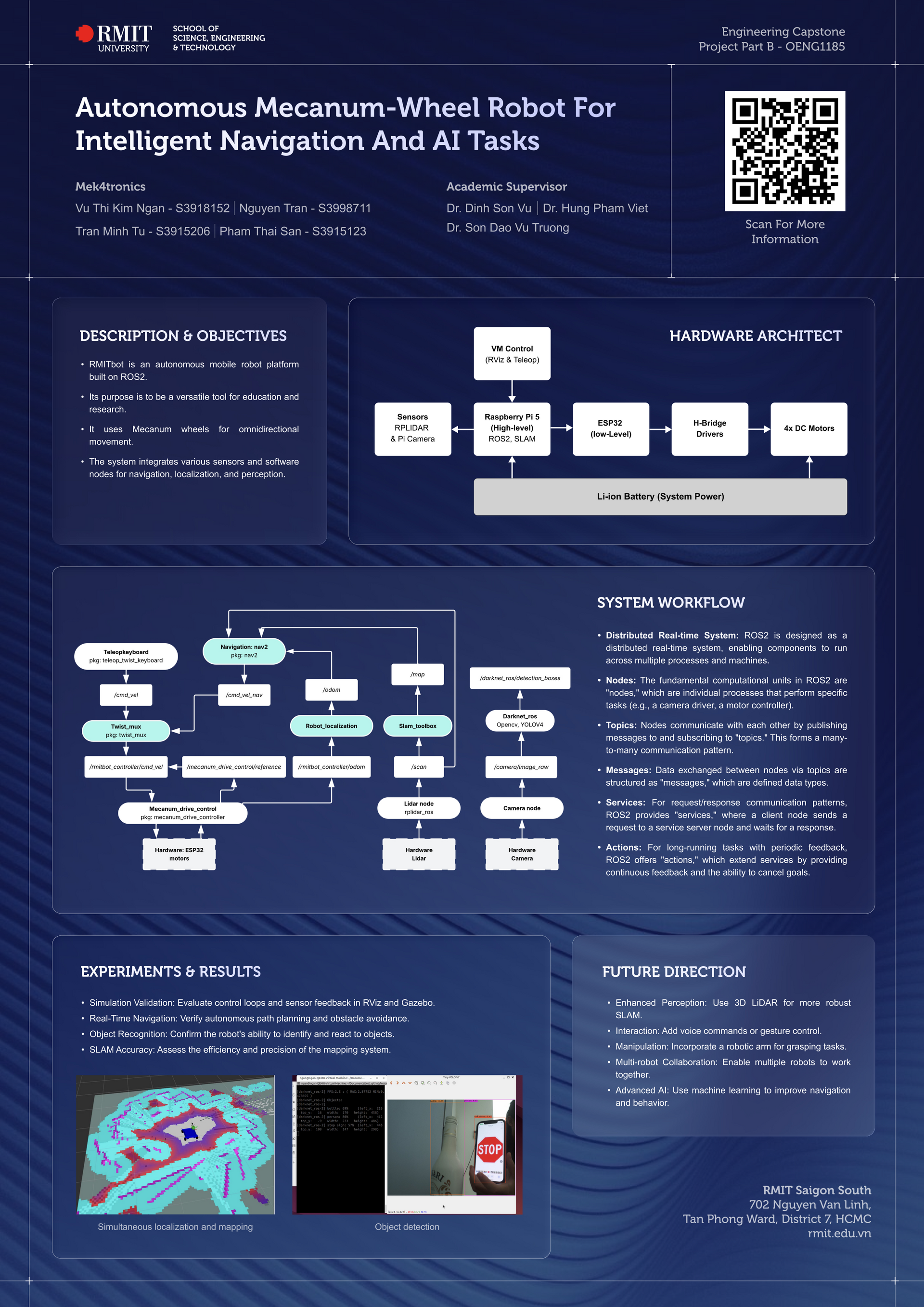
Project Snapshots