AI-Enhanced Vision Distribution for Optimized Robotic Sorting with ABB’s PickMaster Twin
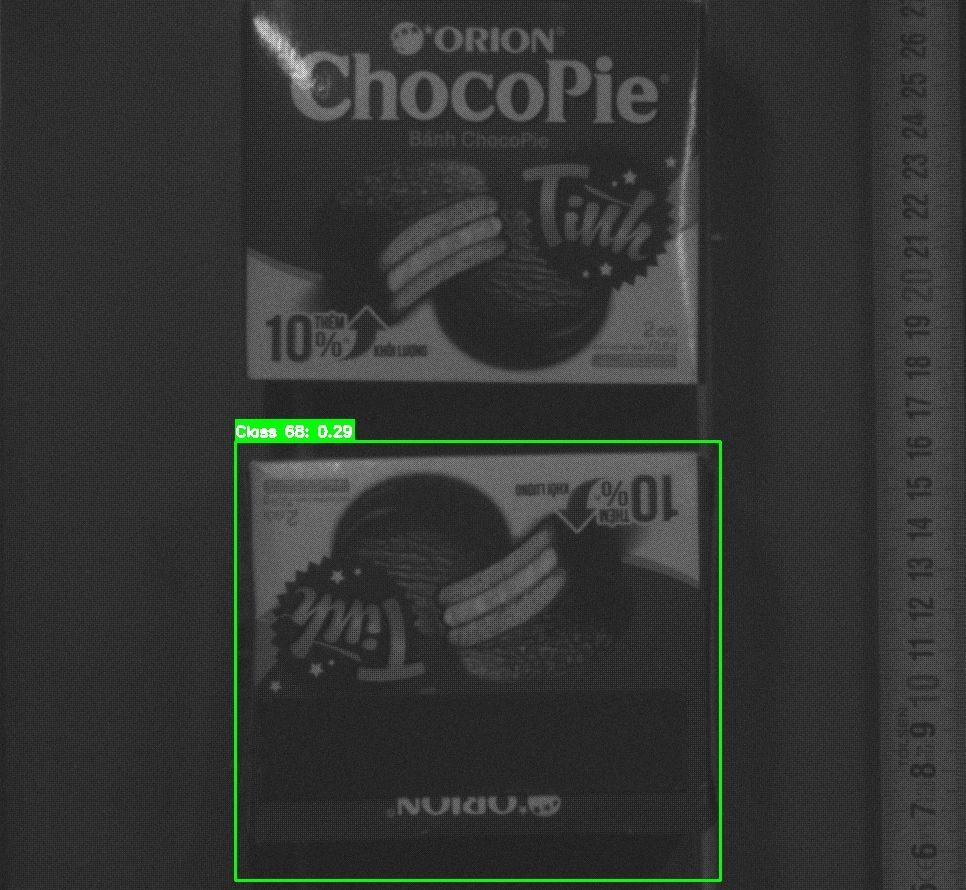
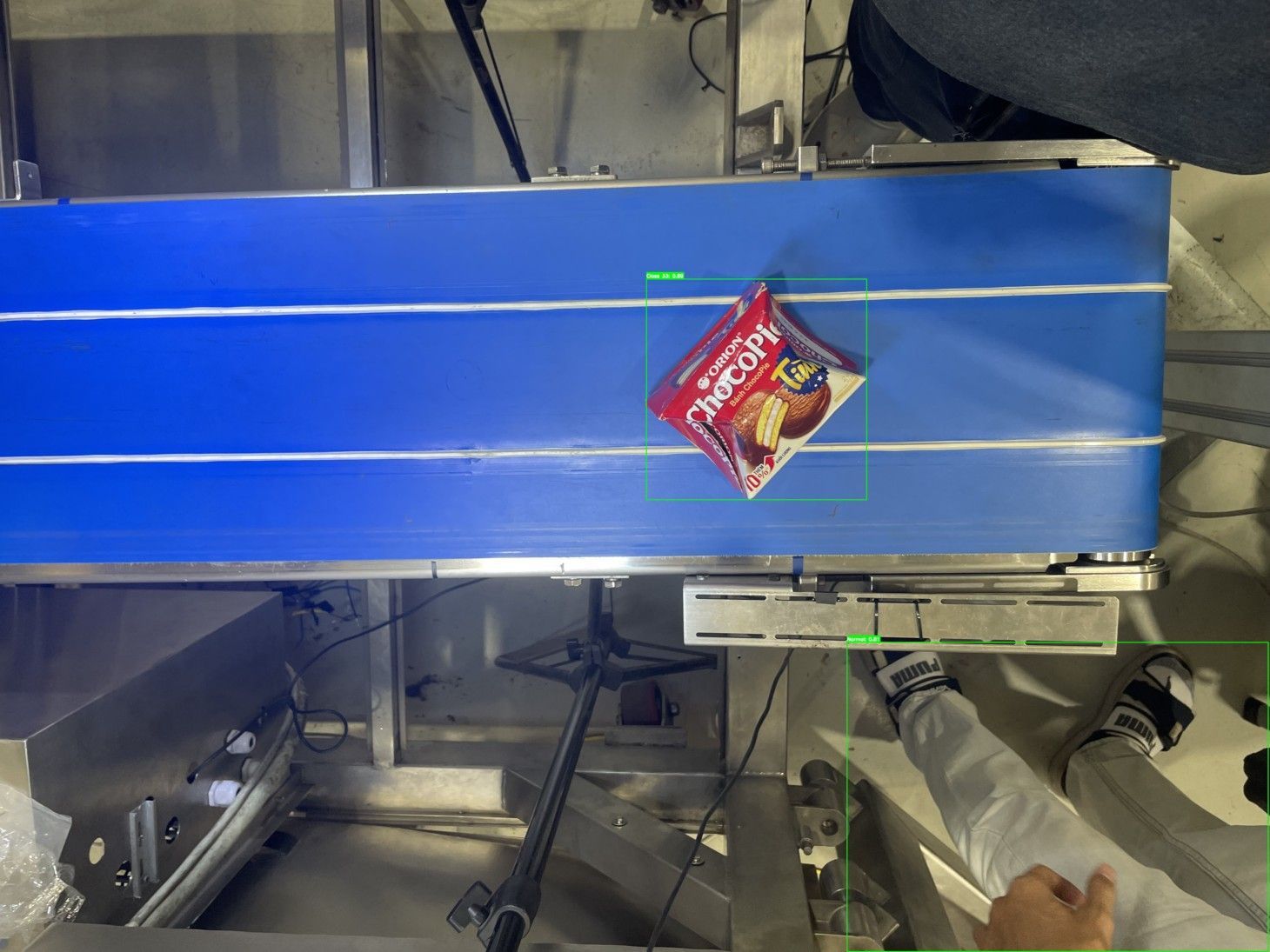
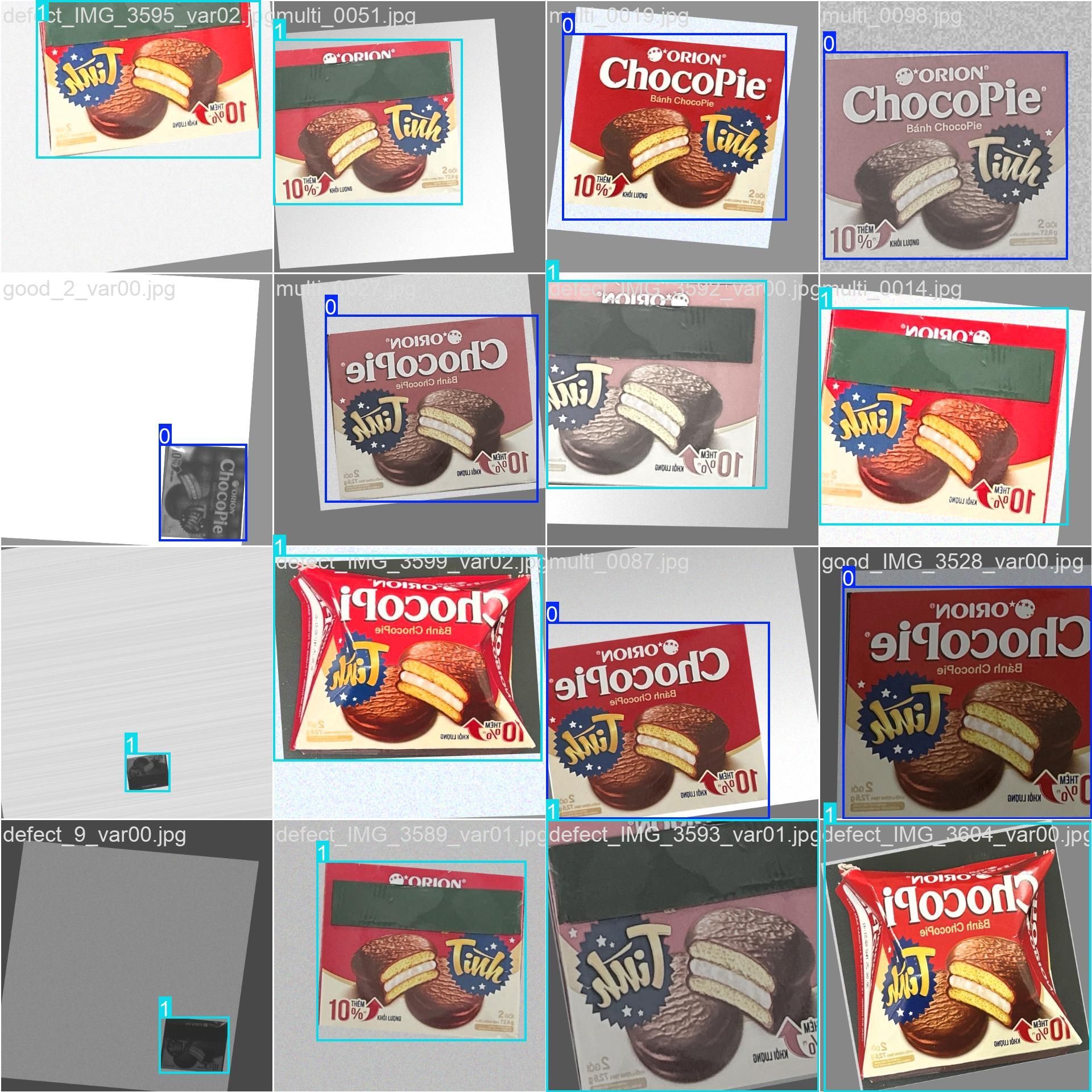
This project focuses on developing an AI computer vision system for sorting Chocopie boxes into two distinguished types good and defect. The system integrates high-speed imaging with deep learning techniques, namely convolutional neural networks (CNNs), to detect defects such as scratches, cracks or missing words on the object's surface. By applying the vision system with ABB's PickMaster Twin, the solution supports real-time decision-making and robotic actuation for accurate defect removal. The aim is to implement faster, more reliable quality control in future production environments, with reduced reliance on manual inspection and higher throughput. The system includes camera calibration, defect classification, and communication with the robotic arm from the AI model. With its ability to adapt to varying conditions, the project is an extendable step towards smarter and adaptive industrial automation.
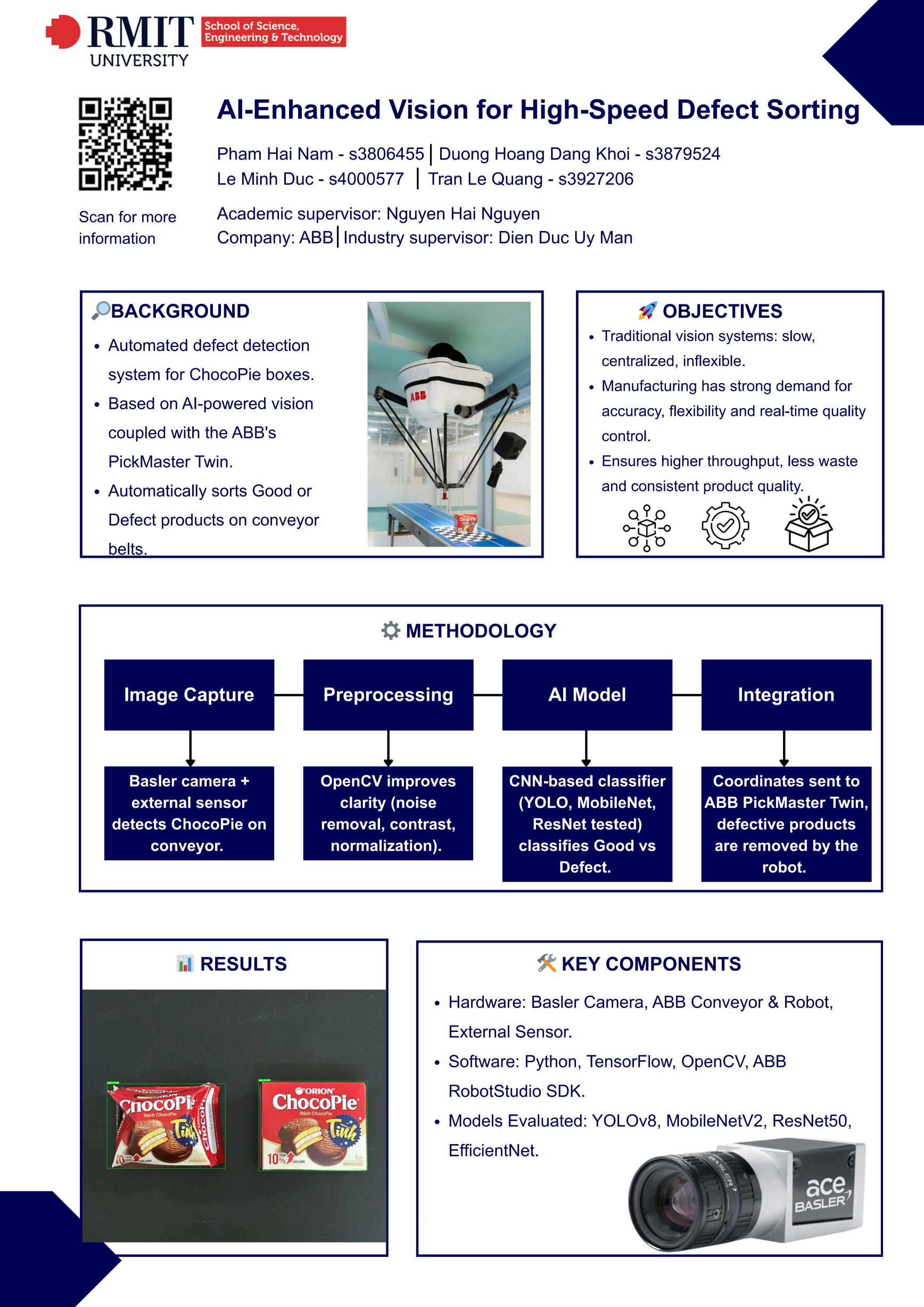
Project Snapshots