Building a Drone from Scratch
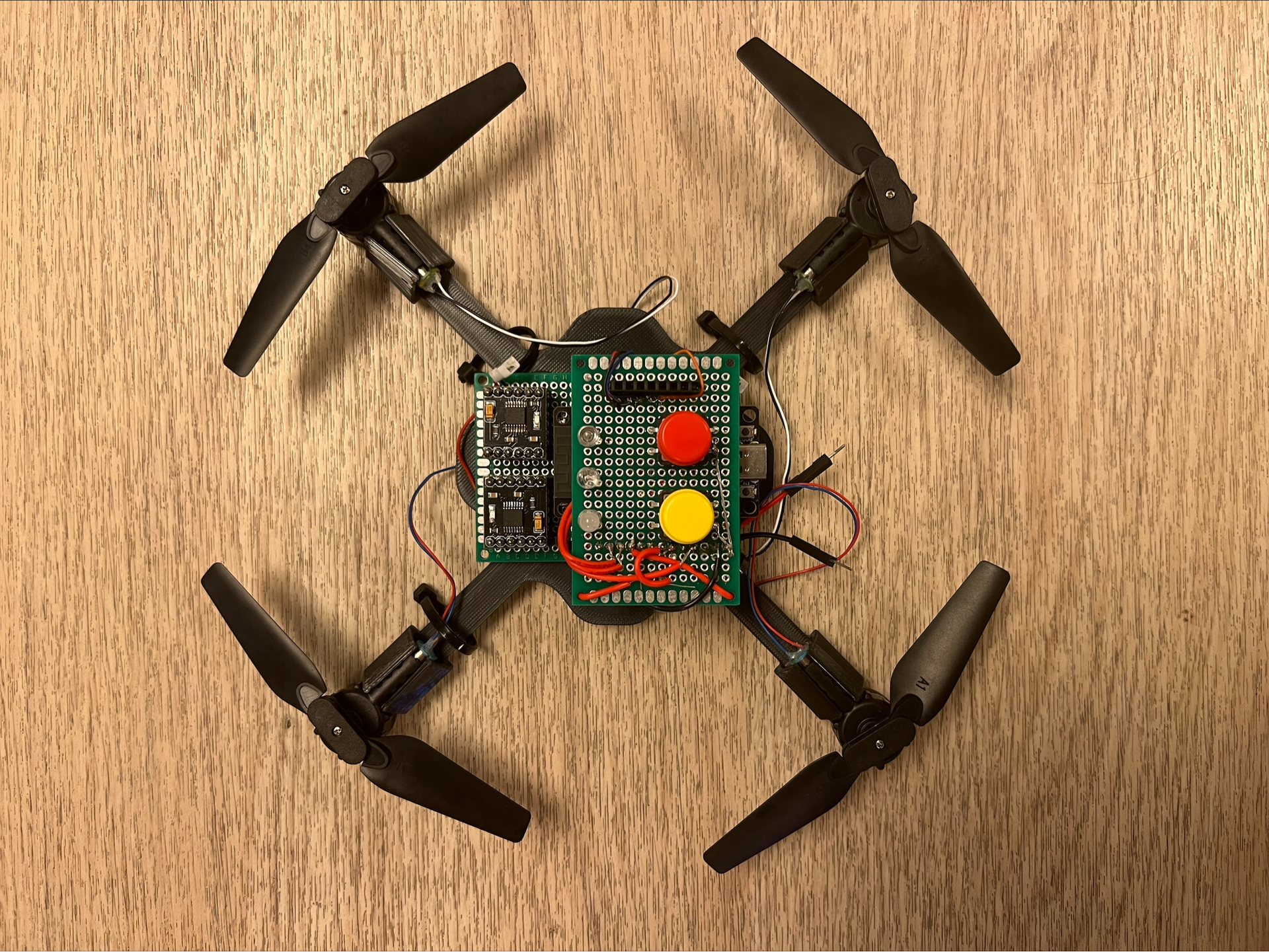
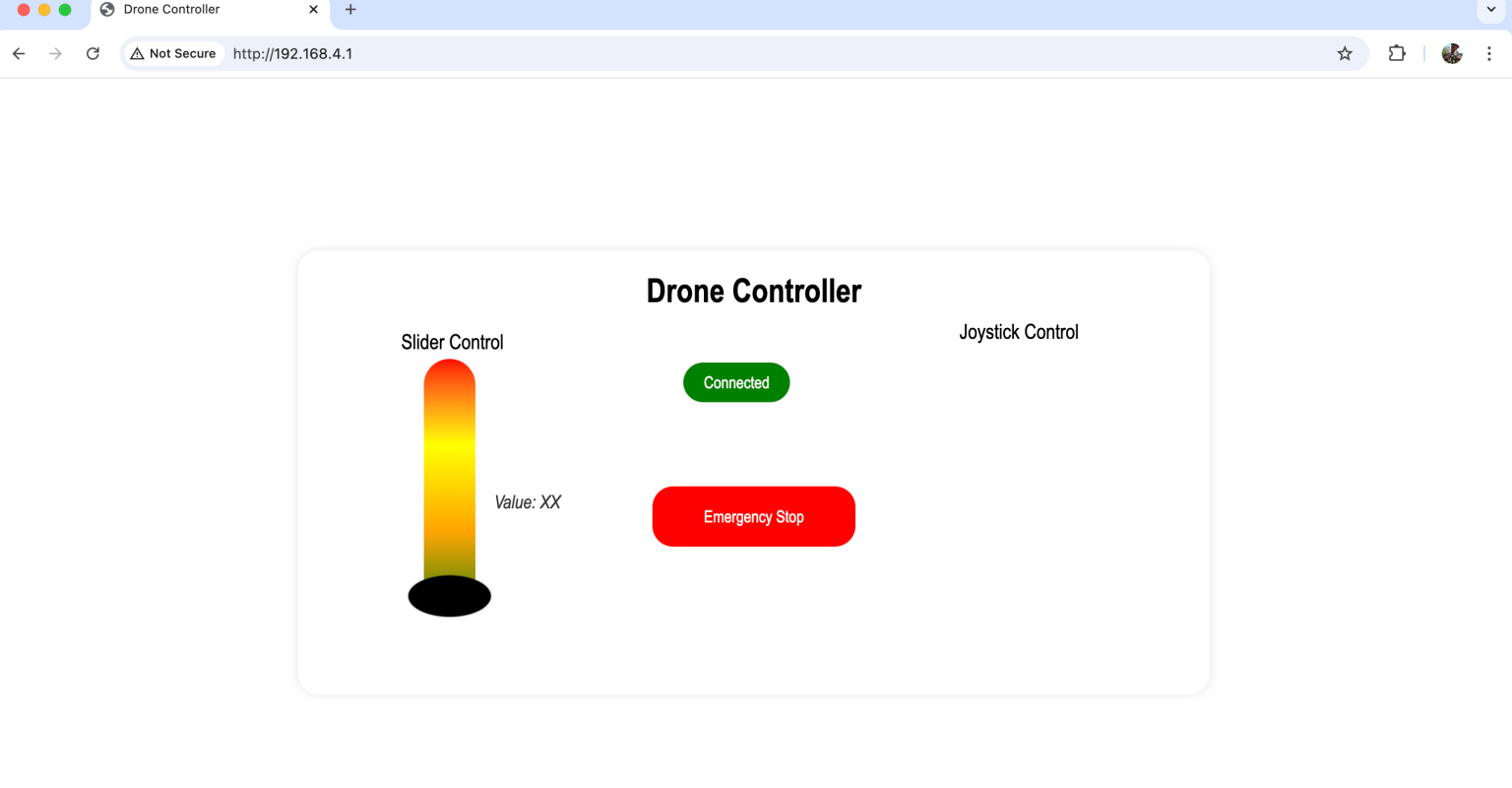
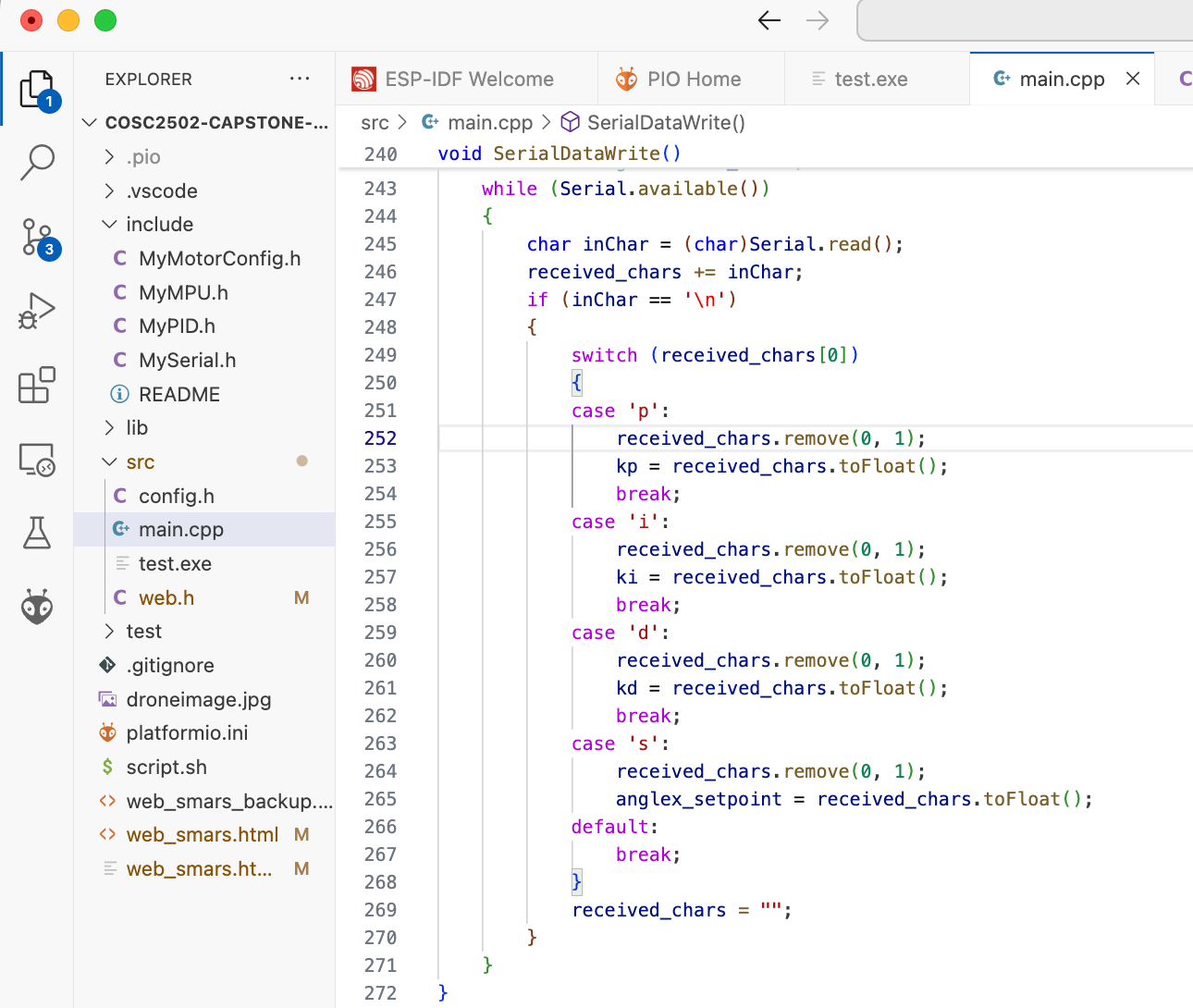
The project objective is to design a mini drone system that can operate in an indoor environment. The drone has a mini size of 200x200 millimeters, enabling autonomous navigation and obstacles avoidance. The system accelerates based on the 4 propellers, in which an IMU can estimate the pitch and roll angles during the flights, and a cascade PID controlling algorithm helps keep the system balanced by adjusting proper propeller speeds. The whole system receives the control signal from the well-known microcontroller ESP32 which connects with the motor drivers DRV8833, a Lipo 3.7V battery supplier and the IMU MPU6050 through a PCB. It is then integrated with a custom designed PCB with an optimized place and route of the components and has an autonomy of 10 minutes feature. The coreless DC motors rotating the propellers are equipped with pre–designed gearboxes so that they are particularly suitable for mini drone applications because of their small footprint – up to the size of a key. To control the drone at the user-level, either of these two methodologies can be chosen: utilizing the physical controller developed for in-house implementation, or by a website application connected through a Wi-Fi channel.

Project Snapshots