Automated Wedges Collection System
Our project, Automated Wedge Collection System, is developed as part of Capstone Project 2025 to demonstrate how robotics and mechatronics can advance modern agriculture. The system is designed to automate the process of collecting seedlings grown in wedges that is design to grow plant inside and transplanting them into soil beds with precision and consistency.
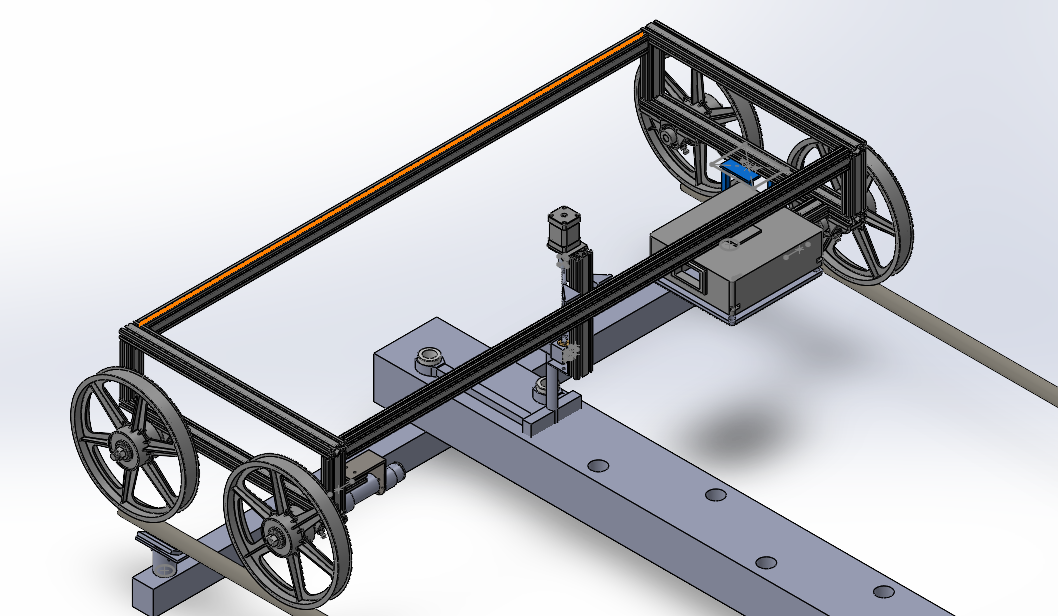
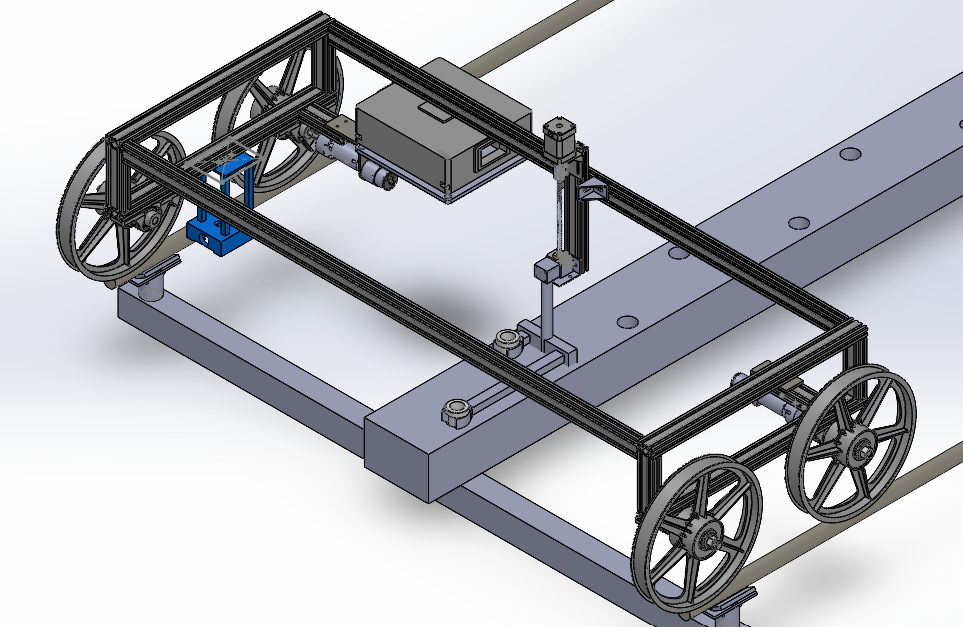
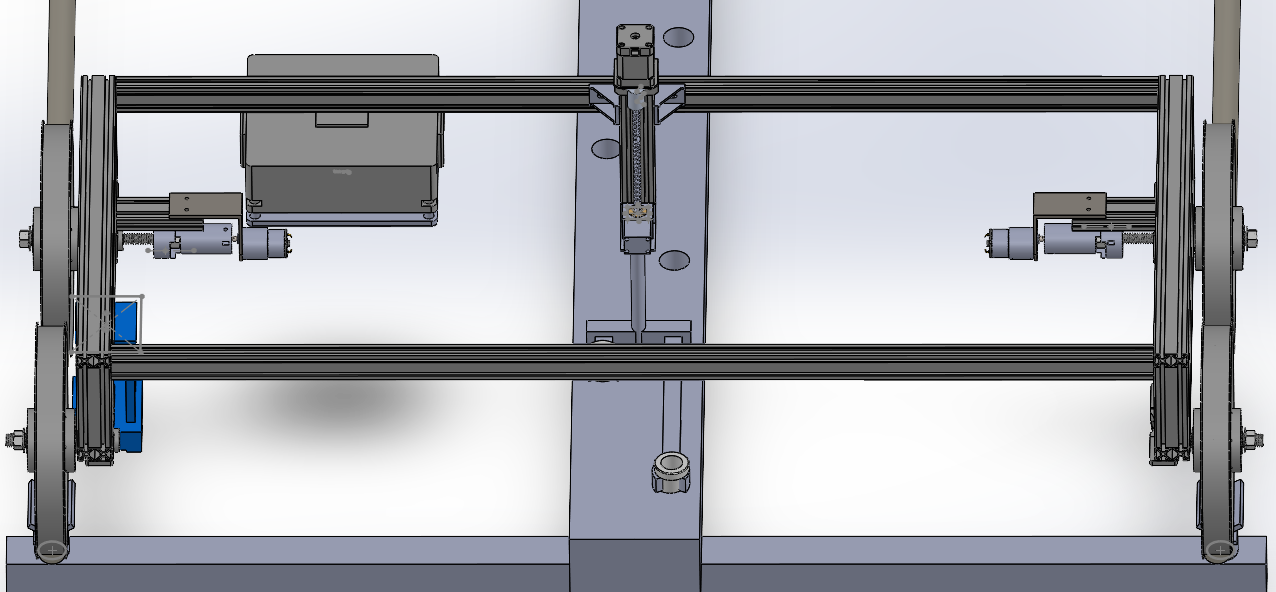
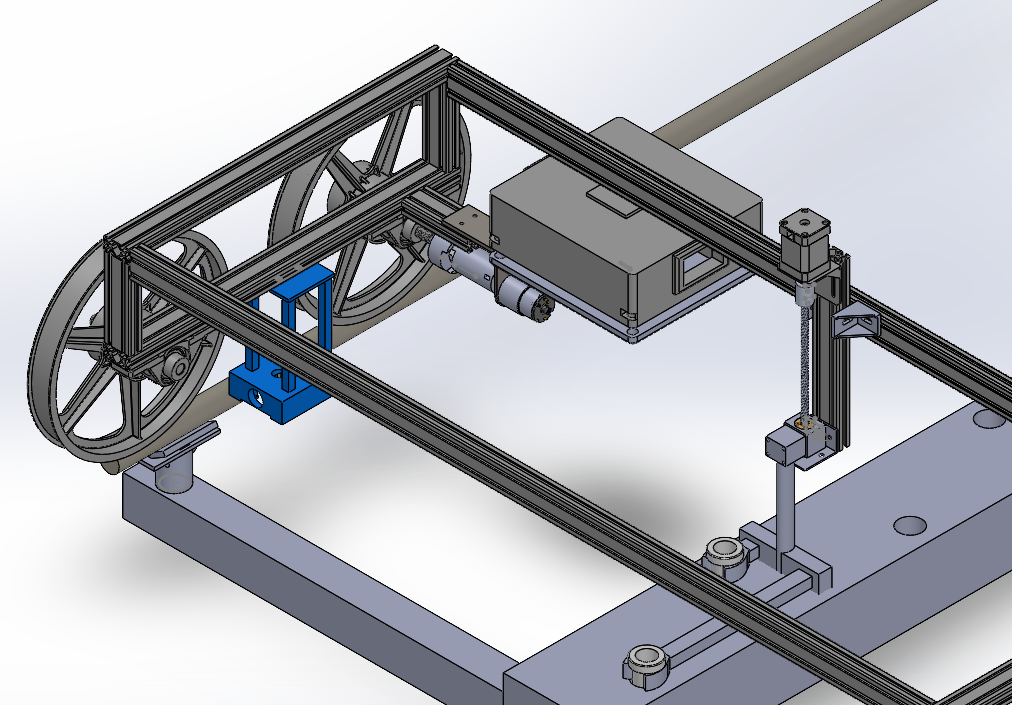
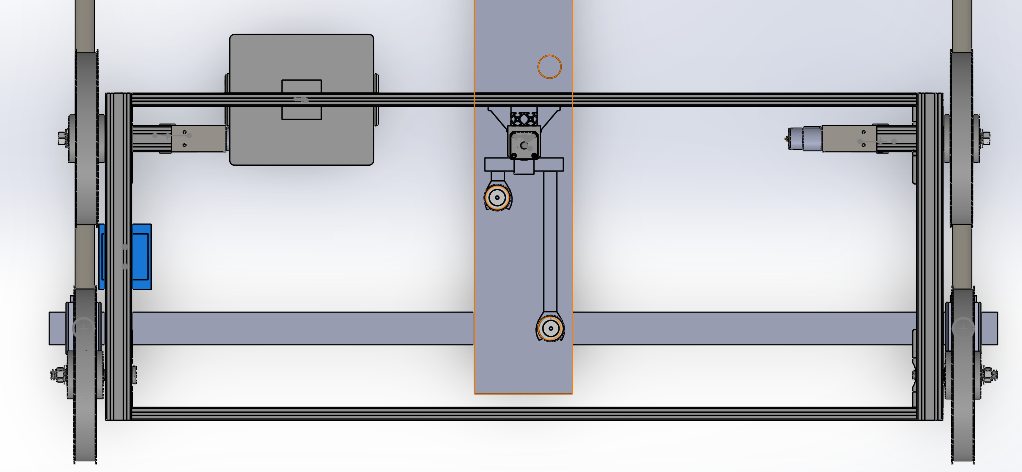
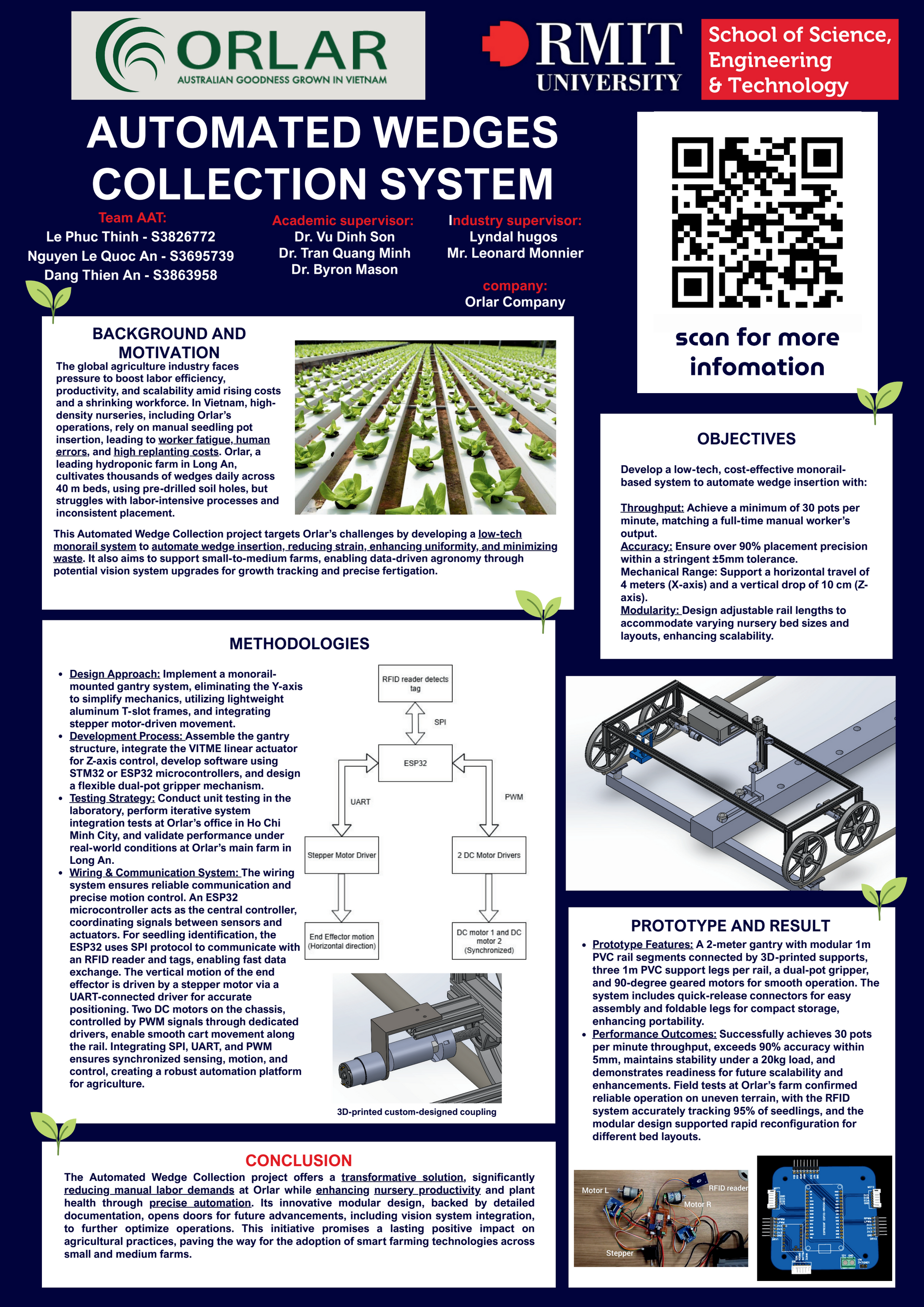
The device operates on a 2-meter rail system, along which a lightweight aluminum cart moves automatically. Mounted on the cart is a robotic end effector, inspired by the structure of a human-like gripper, capable of vertical motion along the z-axis. This allows the system to pick up seedlings securely and insert them into prepared holes in the planting bed. The combination of automated mobility, controlled gripping, and accurate placement reduces the need for repetitive manual labor while improving the uniformity of planting.
This project highlights the potential of robotics in agriculture, where efficiency and sustainability are increasingly critical. By integrating automation into planting tasks, the Automated Wedge Collection System demonstrates how engineering innovation can support farmers, increase productivity, and serve as a foundation for future smart farming solutions.
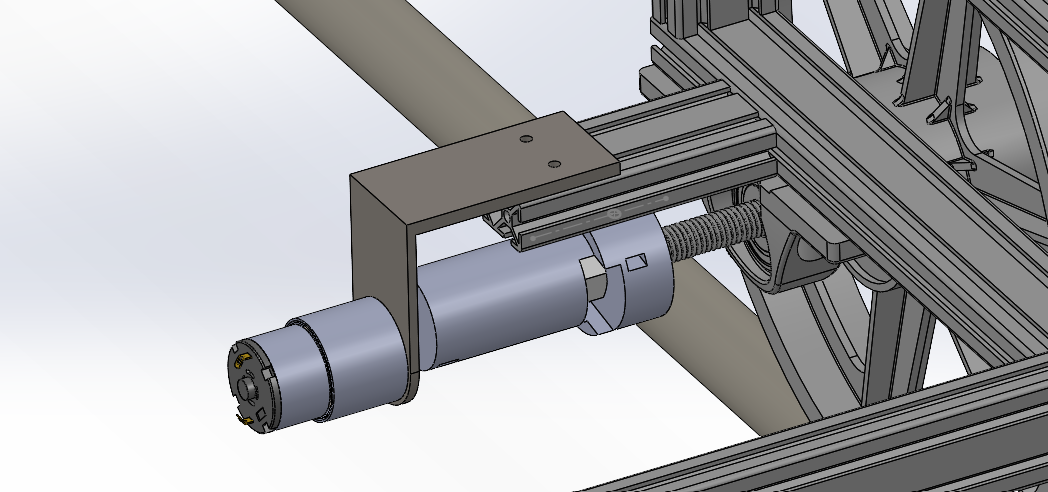
Project Snapshots