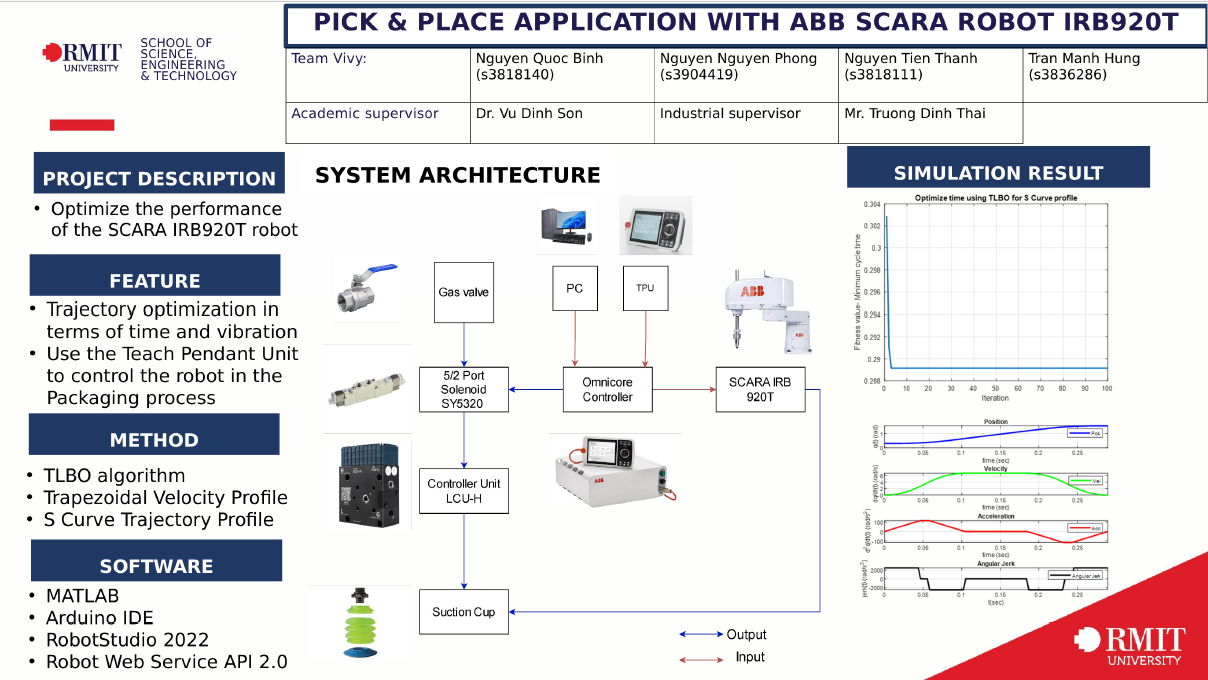
Pick & Place Application with ABB IRB 920T SCARA robot
In this report, with the support from ABB Vietnam, the team will focus on optimizing the performance of the ABB IRB 920T SCARA robot in the Packaging task in terms of cycle time and vibration, as well as build the Human-Machine Interface (HMI) application for the Flex Pendant Teach Pendant Unit (Flex Pendant TPU) using ABB Robot Web Services and Rapid code. In order to quantify the outcomes of the project, our team will create a simple Pick and Place simulation with conveyor belts in RobotStudio to simulate the Packaging process in the assumption working scenario and a Packaging program to operate the real SCARA robot. These 2 examples will be used to evaluate the robot's performance in the ideal condition and the real working scenario.
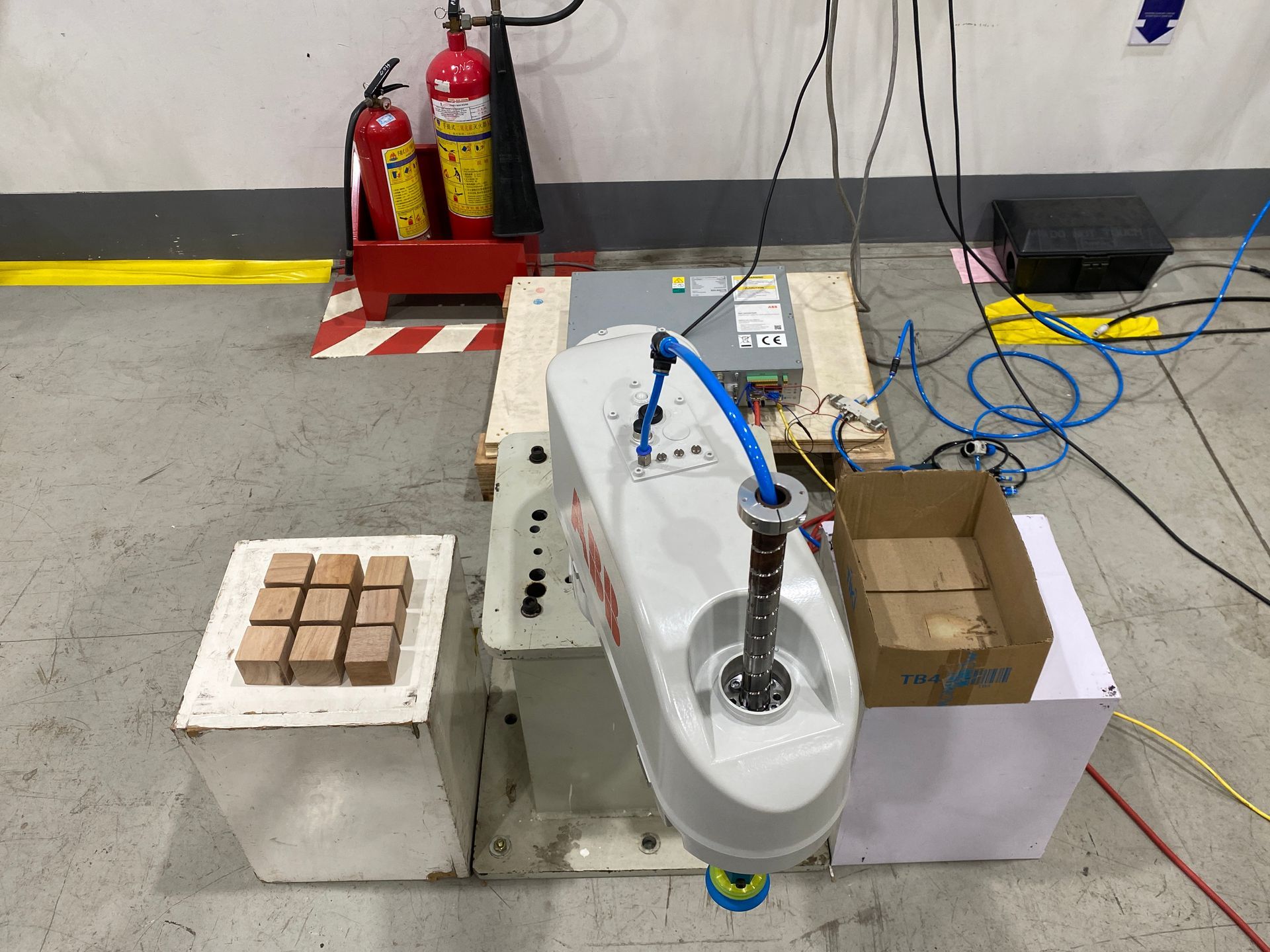
For the testing of the performance of the SCARA robot, the team will use a vacuum gripper to pick multiple small wooden blocks and put them in the cardboard boxes for the testing of the Packaging operation. Overall, with the simple setup for the robot, we can ensure that any available robot can be used for the testing without any significant difference in terms of results.
Project Snapshots